
www.obiuan.net





 Come nasce MikroBot...
Come nasce MikroBot...
|
Grazie a internet oggi si possono avere quasi tutte le informazioni possibili riguardante qualsiasi argomento in tempo reale. In robotica ad esempio, sono moltissimi i siti creati e da essi si possono accedere alle informazioni più disparate. Progetti, schemi, tutorial di qualsiasi genere, mettono in condizioni chiunque di progettare ciò che ha in mente. Inoltre, sempre grazie a internet, si può avere la lista dei siti che vendono il prodotto ricercato già assemblato, con tempi di attesa ridottissimi e pagamenti telematici. Anch'io navigo sovente nel mondo di internet per vedere gli sviluppi e le nuove tecnologie riguardanti la robotica e non solo. Ultimamente mi sono imbattuto su siti dedicati ai microrobot e nanorobot. Sono rimasto affascinato da questi microbi di soli 25x25mm di lato in grado di fare gare e competizioni. Lo spunto per MikroBot l'ho preso da questi siti di micro e nano robotica. Il grosso problema che avrei incontrato sarebbe stato quello di riprodurre l'elettronica. Ho grossi problemi per ora a maneggiare componentistica smd non avendo un'attrezzatura adatta. Ho pensato quindi, di progettare qualcosa alla portata di tutti semplice e di un po più maneggevole con componentistica tradizionale, mantenendo comunque dimensioni ridotte . In futuro comunque il 25x25 autocostruito è uno dei miei prossimi obbiettivi elettronica compresa vedremo..... |
Progetto
di MikroBot...
|
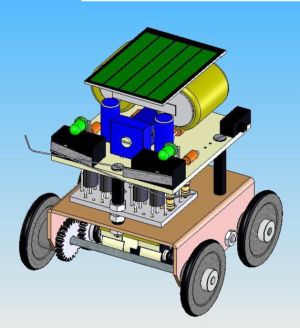
MikroBot nasce in una fredda notte d'inverno. Mentre navigavo su internet mi sono imbattuto su uno dei tanti siti dove venivano presentati degli schemi con relativo master da scaricare, adibiti alla movimentazione di piccoli robot. Oltre alla semplicità dei circuiti, Il cuore vero e proprio del sistema erano degli integrati di semplice reperibilità, utilizzati in particolar modo sui siti che trattano robotica B.E.A.M. i famosi 74HC14 e I 74HCT240. Il sito in questione è: http://home.wanadoo.nl/m.m.avos/pathfinder.htm. Il circuito è quello di Juan Cubillo progettato per il suo Pathfinder1 un semplice robot adatto per i principianti e non. Grazie alle dimensioni delle schede e alla semplicità dello schema ho pensato di utilizzarlo per creare un robottino dalle dimensioni ridotte. Con un cad bidimensionale prima e tridimensionale dopo ho disegnato la scheda principale per I miei scopi. Non essendo un elettronico inoltre ho cercato di imparare a grandi linee l'utilizzo di un cad elettronico che permetteva inoltre, la simulazione del funzionamento virtuale del circuito. Solo dopo aver costruito Il primo circuito e verificato il corretto funzionamento con motori, micro e alimentazione volanti ho pensato di realizzare la parte meccanica. Il problema principale che ho incontrato è stato quello di pensare alla realizzazione delle parti utilizzando pezzi di recupero rimossi qua e la principalmente da giocattoli rotti e apparecchiature non piu funzionanti. Un altro problema è stato quello di riuscire a costruire e assemblare le parti, utilizzando il minimo indispensabile di attrezzature e in uno spazio delle dimensioni di una scrivania. Dopo le prime bozze nate utilizzando un cad 2D, revisioni per rendere comodo il montaggio e semplice la struttura, sono passato alla realizzazione in 3D del prototipo con uno dei migliori cad adatti allo scopo. In figura 1 potete vedere una bozza iniziale del progetto In tre dimensioni. Con un cad 3D inoltre è possibile ruotare un oggetto disegnato e assemblato in qualsiasi posizione in modo virtuale, per avere un'idea di come uscirà il l'oggetto finito. Ora... vediamo tutte le parti che dovremo costruire e modificare per realizzare MikroBot. |
|
|
Fig. 3
Fig. 5 |
Fig. 4
Fig. 6 |
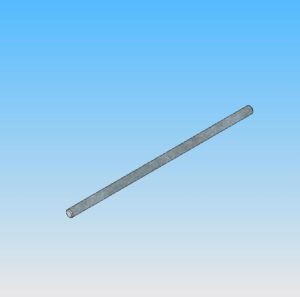

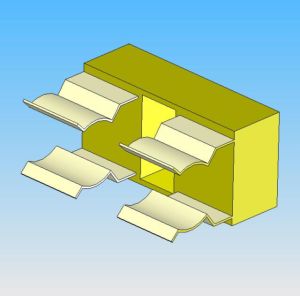
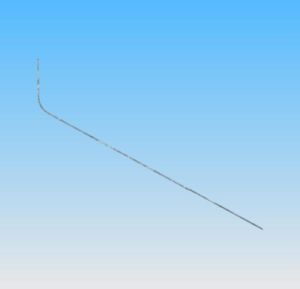
In fig. 3 vediamo uno dei due alberini di trasmissione. Nella 4 uno dei tre distanziali dei quali uno avrà una lunghezza diversa dagli altri due. Nella fig. 5 invece, vediamo uno dei due supporto motori ricavato da dei normali portafusibili per circuito stampato. Questo pezzo sarà da modificare vedi tutorial supporto motori. Nella 6 invece è rappresentato uno dei due baffi di contatto. Vediamo ora invece le parti elettroniche da realizzare:
Parti elettroniche da
realizzare...
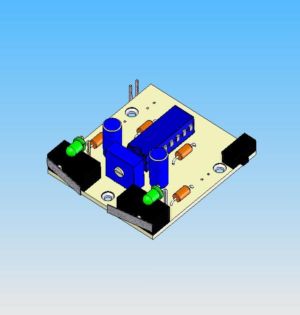
Fig. 7
In fig. 7 vediamo un disegno della piastra principale che sarà quella che governerà il moto del robot. Per chi avesse problemi a eseguire gli stampati nella sezione tutorial vedere circuiti stampati che spiega uno dei metodi su come realizzarli.
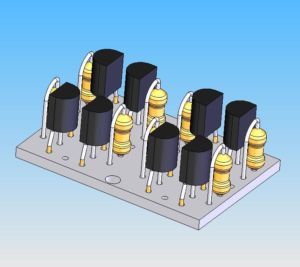
Fig. 8
In figura 8 invece vediamo il disegno dei due ponti H necessari al cambio di direzione nel caso uno o entrambi I baffi toccano un ostacolo. Anche per questo circuito, vedere il tutorial Circuiti stampati relativo per la sua realizzazione. Nelle cinque figure sottostanti possiamo vedere invece come si presenta MikroBot nelle varie viste utilizzando un cad tridimensionale.





{kind=link}
Per quanto riguarda tutte le altre parti necessarie per la realizzazione del robot, ognuno può costruirsele come vuole se dispone di attrezzatura adeguata o recuperarle da parti rotte o non più utilizzate es. giocattoli,unità cd obsolete, ecc. Lo scopo di questo progetto è infatti quello di acquistare meno parti possibili. In figura 9 vediamo un immagine d'insieme di tutte le parti da recuperare e costruire.

Fig. 9
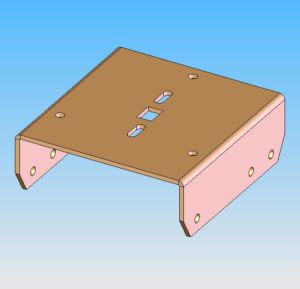
La tabella sottostante, riporta una lista di tutti I pezzi che occorrono alla realizzazione di MikroBot. Per chi volesse avere un'idea dell'insieme delle parti necessarie, vedere la sezione Le sue foto. La tabella è strutturata in questo modo: La colonna Parti Indica la denominazione del particolare. Quantità indica il numero della stessa parte necessaria. Dimensioni indica le quote che devono avere le parti in questione. Nel caso di Vedere tutorial le quote della parte saranno rappresentate in un disegno nella sezione relativa a quel particolare. La colonna Reperibilità invece indica se il particolare in questione può essere: costruito,di recupero o acquistato. La fig. 9 vi aiuta a capire di quale particolare stiamo parlando. Incominciamo dal telaio in alto a sinistra.
|
Parti |
Quantità |
Dimensioni |
Reperibilità |
|
Telaio |
1 |
Costruire |
|
|
Scheda principale |
1 |
Costruire |
|
|
Scheda ponti |
1 |
Costruire |
|
|
Cella solare |
1 |
Panasonic BP 243318 |
Acquistare |
|
Batterie |
2 |
Extracell 1,2 v 130 mAh Ø= 14 L=17 |
Acquistare |
|
Connettore |
1 |
passo 2.54 mm maschio 3 pin |
Recupero |
|
Connettore |
1 |
passo 2.54 mm 5 pin |
Recupero |
|
Baffo |
2 |
Acciaio armonico Ø 0,5 |
Costruire |
|
Pulegge |
4 |
Ø esterno= 20 mm |
Recupero |
|
Boccole |
4 |
Acquistare |
|
|
Oring |
4 |
Ø int.=18 mm sez. 1,5 |
Acquistare |
|
Vite |
2 |
M2 x L= 18 mm |
Recupero |
|
Dado |
4 |
M2 |
Recupero |
|
Ruote dentate |
4 |
Recupero Modificare |
|
|
Pulegge |
2 |
Ø esterno= 7 sp. 3,5 mm |
Recupero |
|
Motore |
2 |
micromotoriduttore planetario 500 giri/min |
Acquistare |
|
porta fusibili |
2 |
Acquistare Modificare |
|
|
Dado |
2 |
M2 |
Recupero |
|
Vite |
2 |
M2 x L= 5 mm |
Recupero |
|
Vite |
3 |
M2 o M2,5 x L= 20 |
Recupero |
|
Termorestringente |
|
Per fissaggio baffi |
Acquistare |
|
Albero |
2 |
Costruire |
|
|
Oring |
2 |
Ø int.=12,5 mm sez. 1,5 |
Acquistare |
|
Connettore |
5 |
Passo 2,54 |
Recupero |
|
Connettore |
2 |
Passo 1,27 |
Recupero |
|
Distanziale |
3 |
Costruire |
|
|
Rondella |
1 |
per M2 o m2,5 sp. 1mm |
Recupero |
|
Dado |
5 |
M2 o M2,5 |
Recupero |
|
Cavetti vari |
|
Rosso e nero |
Recupero |




|
I contenuti di questo sito sono per uso didattico e/o amatoriale. L'utilizzo commerciale non è consentito. L'autore declina ogni responsabilità per danni arrecati a cose e/o persone in conseguenza alla realizzazione e/o all'uso dei progetti presentati in questo sito. |