| Che cos'è la robotica
BEAM? Il termine BEAM è un
acronimo di:
Biology - i robot sono repliche
di forme di vita elementari, funzionano ad energia solare e non hanno
batterie
Electronics - i robots
funzionano grazie a circuiti semplici e non fanno uso di microcontrollori
programmabili e di software
Aesthetics - una certa
attenzione viene posta all'estetica del circuito e del montaggio, spesso
realizzato "in aria" (free-form), senza circuiti stampati
Mechanics - la parte meccanica
della realizzazione è rilevante per il funzionamento del robot
 
Mark
Tilden, fondatore della robotica BEAM
La robotica BEAM è basata su tre principi
fondamentali:
- usa una circuiteria minimalista, evitando
la complessità (KISS: keep it simple, stupid!) e riducendo i
costi
- ricicla e riutilizza materiali e pezzi di
recupero, smontati da altri apparecchi (PC, VCR, walkman, cellulari,
ecc.)
- usa come alimentazione del robot l'energia
prodotta da piccoli pannelli solari
I tipici robot del "bestiario"
BEAM sono:
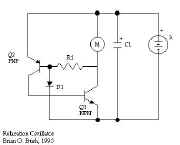 |
SOLARENGINE: è il
cuore di molti robot BEAM. Permette di trasformare l'energia
luminosa, catturata dal pannello solare, in energia elettrica (vedi
 e ).
e ). |
|

|
SYMET: è il tipico
BEAM per principianti (vedi ). Ha un
unico motore, sul cui albero il robot "barcolla", andando a sbattere
e cambiando direzione in modo passivo (cioè senza
sensori). |
|

|
SOLAROLLER: è
praticamente un dragster senza sterzo, azionato da un motore
solare |
 |
PHOTOPOPPER: è un
robot fotovoro (= "mangia-luce") a due motori, alimentati da due solarengine,
con fototropismo positivo (cioè si dirige verso la fonte luminosa);
può essere dotato di sensori (bumpers, fotodiodi, LDR) |
 |
TRACKING HEAD: è
una "testa" che segue la fonte luminosa |
|
|
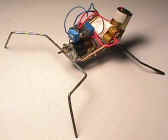
WALKER: è un robot
a forma di insetto che, come dice il nome, cammina mediante due (o
più) motori. Il cuore dei walker BEAM è il Microcore |
SITI DA VISITARE:
http://faq.solarbotics.net/
http://www.solarbotics.net/bftgu/default.htm
|